opinf.ddt#
Tools for estimating snapshot time derivatives.
Classes
Template for time derivative estimators. |
|
Time derivative estimation with finite differences for state snapshots spaced uniformly in time. |
|
Time derivative estimation with finite differences for state snapshots that are not spaced uniformly in time. |
|
Time derivative estimator based on interpolation. |
Finite Difference Schemes for Uniformly Spaced Data
Forward Differences
First-order forward difference for estimating the first derivative. |
|
Second-order forward difference for estimating the first derivative. |
|
Third-order forward difference for estimating the first derivative. |
|
Fourth-order forward difference for estimating the first derivative. |
|
Fifth-order forward difference for estimating the first derivative. |
|
Sixth-order forward difference for estimating the first derivative. |
Backward Differences
First-order backward difference for estimating the first derivative. |
|
Second-order backward difference for estimating the first derivative. |
|
Third-order backward difference for estimating the first derivative. |
|
Fourth-order backward difference for estimating the first derivative. |
|
Fifth-order backward difference for estimating the first derivative. |
|
Sixth-order backward difference for estimating the first derivative. |
Central Differences
Second-order central difference for estimating the first derivative. |
|
Fourth-order central difference for estimating the first derivative. |
|
Sixth-order central difference for estimating the first derivative. |
Mixed Differences
Second-order forward, central, and backward differences for estimating the first derivative. |
|
Fourth-order forward, central, and backward differences for estimating the first derivative. |
|
Sixth-order forward, central, and backward differences for estimating the first derivative. |
|
Forward, central, and backward differences for estimating the first derivative. |
Finite Difference Schemes for Nonuniformly Spaced Data
Second-order finite differences for estimating the first derivative. |
|
Finite differences for estimating the first derivative. |
Overview
Operator Inference for continuous models requires time derivatives of the state snapshots.
opinf.ddtprovides tools for estimating the time derivatives of the state snapshots.Finite difference approximations are available through
UniformFiniteDifferencerandNonuniformFiniteDifferencer.
import opinf
import numpy as np
import scipy.interpolate as spinterpolate
opinf.utils.mpl_config()
Time Derivative Estimation#
To calibrate time-continuous models, Operator Inference requires the time derivative of the state snapshots. For example, consider the LTI system
Here, \(\qhat(t)\in\RR^{r}\) is the time-dependent (reduced-order) state and \(\u(t)\in\RR^{m}\) is the time-dependent input. In order to learn \(\Ahat\) and \(\Bhat\), Operator Inference solves a regression problem of the form
or similar, where each triplet \((\qhat_j, \dot{\qhat}_j, \u_j)\) should correspond to the solution of (10) at some time \(t_j\), \(j = 0, \ldots, k - 1\). In particular, we want
This module provides tools for estimating the snapshot time derivatives \(\dot{\qhat}_0,\ldots,\dot{\qhat}_{k-1}\in\RR^{r}\) from the reduced snapshots \(\qhat_0,\ldots,\qhat_{k-1}\in\RR^{r}\).
Preprocessing and Time Derivatives
In some cases, a full-order model may provide snapshot time derivatives \(\dot{\q}_0,\ldots,\dot{\q}_{k-1}\in\RR^{n}\) in addition to state snapshots \(\q_0,\ldots,\q_{k-1}\in\RR^{n}\). If any lifting or preprocessing steps are used on the state snapshots, be careful to use the appropriate transformation for snapshot time derivatives, which may be different than the transformation used on the snapshots themselves.
For example, consider the affine state approximation \(\q(t) \approx \Vr\qhat(t) + \bar{\q}\) with an orthonormal basis matrix \(\Vr\in\RR^{n\times r}\) and a fixed vector \(\bar{\q}\in\RR^{n}\). In this case,
Hence, while the compressed state snapshots are given by \(\qhat_j = \Vr\trp(\q_j - \bar{\q})\), the correct compressed snapshot time derivatives are \(\dot{\qhat}_j = \Vr\trp\dot{\q}_j\) (without the \(\bar{\q}\) shift).
See opinf.lift.LifterTemplate.lift_ddts() and opinf.pre.TransformerTemplate.transform_ddts().
Finite Difference Estimators#
Partial Estimation#
Every finite difference scheme has limitations on where the derivative can be estimated. For example, a first-order backward scheme requires \(\qhat(t_{j-1})\) and \(\qhat(t_j)\) to estimate \(\dot{\qhat}(t_j)\), hence the derivative cannot be estimated at \(t = t_0\).
The forward, backward, and central difference functions (fwd1(), bwd3(), ctr6(), etc.) take in a snapshot matrix \(\Qhat\in\RR^{r\times k}\), a time step, and (optionally) the corresponding input matrix \(\U\in\RR^{m\times k}\) and return a subset of the snapshots \(\Qhat'\in\mathbb{R}^{r\times k'}\), the corresponding derivatives \(\dot{\Qhat}\in\RR^{r\times k'}\), and (optionally) the corresponding inputs \(\U'\in\RR^{m \times k'}\).
# Set a state dimension, input dimension, and number of snapshots.
r = 20
m = 3
k = 400
# Make test data.
t = np.linspace(0, 1, k)
Q = np.random.random((r, k))
U = np.random.random((m, k))
# Extract the time step.
dt = t[1] - t[0]
Qnew, Qdot = opinf.ddt.bwd2(states=Q, dt=dt)
print(f"{Qnew.shape=}, {Qdot.shape=}")
Qnew.shape=(20, 398), Qdot.shape=(20, 398)
Qnew, Qdot, Unew = opinf.ddt.ctr6(states=Q, dt=dt, inputs=U)
print(f"{Qnew.shape=}, {Qdot.shape=}, {Unew.shape=}")
Qnew.shape=(20, 394), Qdot.shape=(20, 394), Unew.shape=(3, 394)
Complete Estimation#
The finite difference functions ord2(), ord4(), and ord6() mix forward, central, and backward differences to provide derivative estimates for all provided state snapshots.
These schemes are used by ddt_uniform(), and ddt_nonuniform(), which only return the estimated derivatives.
Qnew, Qdot = opinf.ddt.ord4(states=Q, dt=dt)
print(f"{Qnew.shape=}, {Qdot.shape=}")
print(f"{(Qnew is Q)=}")
Qnew.shape=(20, 400), Qdot.shape=(20, 400)
(Qnew is Q)=True
Qdot = opinf.ddt.ddt_uniform(states=Q, dt=dt, order=4)
print(f"{Qdot.shape=}")
Qdot.shape=(20, 400)
Qdot = opinf.ddt.ddt_nonuniform(states=Q, t=t)
print(f"{Qdot.shape=}")
Qdot.shape=(20, 400)
Convenience Classes#
The classes UniformFiniteDifferencer and NonuniformFiniteDifferencer wrap the finite difference methods listed above for use with opinf.roms classes.
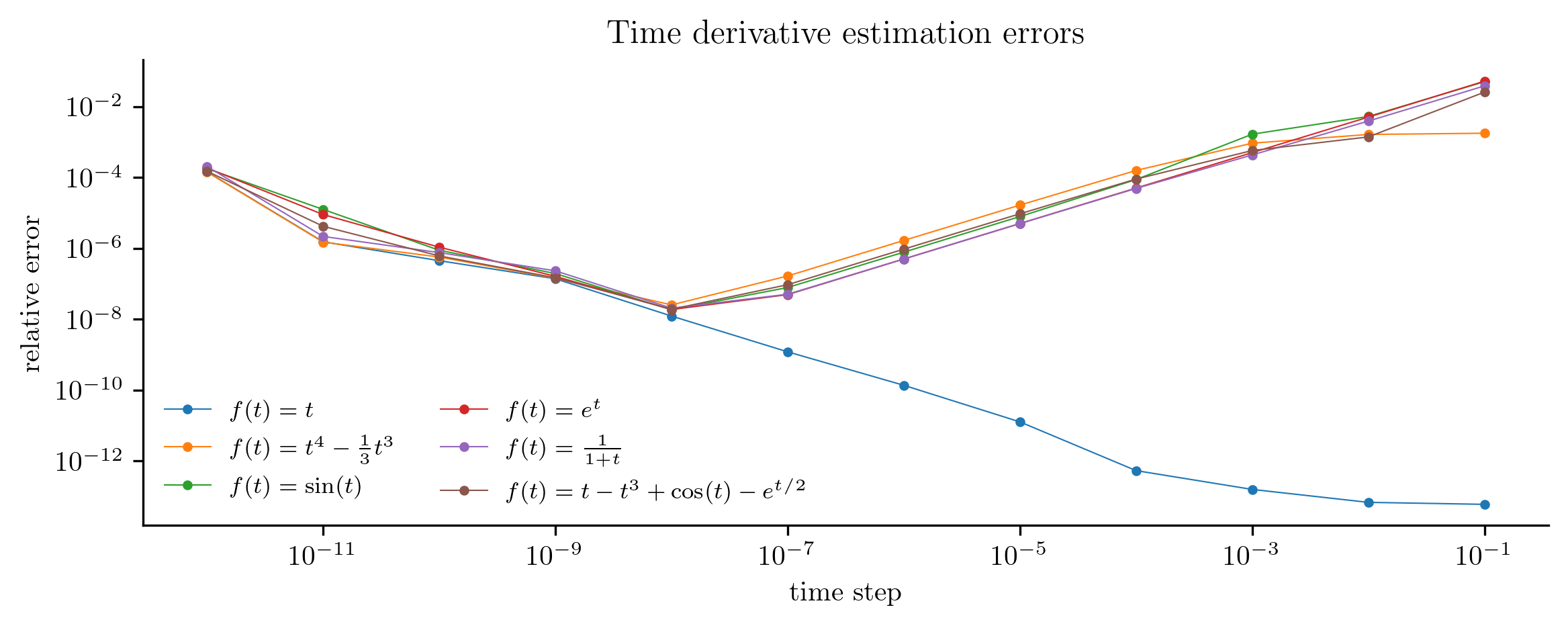
They also have a verify() method for checking the estimation scheme against true derivatives for a limited set of test cases.
differ = opinf.ddt.UniformFiniteDifferencer(t, scheme="fwd1")
print(differ)
UniformFiniteDifferencer
time_domain: 400 entries in [0.0, 1.0]
dt: 2.5063e-03
scheme: fwd1()
differ.verify(plot=True)
estimate() output shapes are consistent
Qnew, Qdot, Unew = differ.estimate(states=Q, inputs=U)
print(f"{Qnew.shape=}, {Qdot.shape=}, {Unew.shape=}")
Qnew.shape=(20, 399), Qdot.shape=(20, 399), Unew.shape=(3, 399)
Interpolatory Estimators#
The InterpDerivativeEstimator interpolates the state data using classes from scipy.interpolate and evaluates the derivative of the interpolant.
estimator = opinf.ddt.InterpDerivativeEstimator(t, "pchip")
print(estimator)
InterpDerivativeEstimator
time_domain: 400 entries in [0.0, 1.0]
InterpolatorClass: PchipInterpolator()
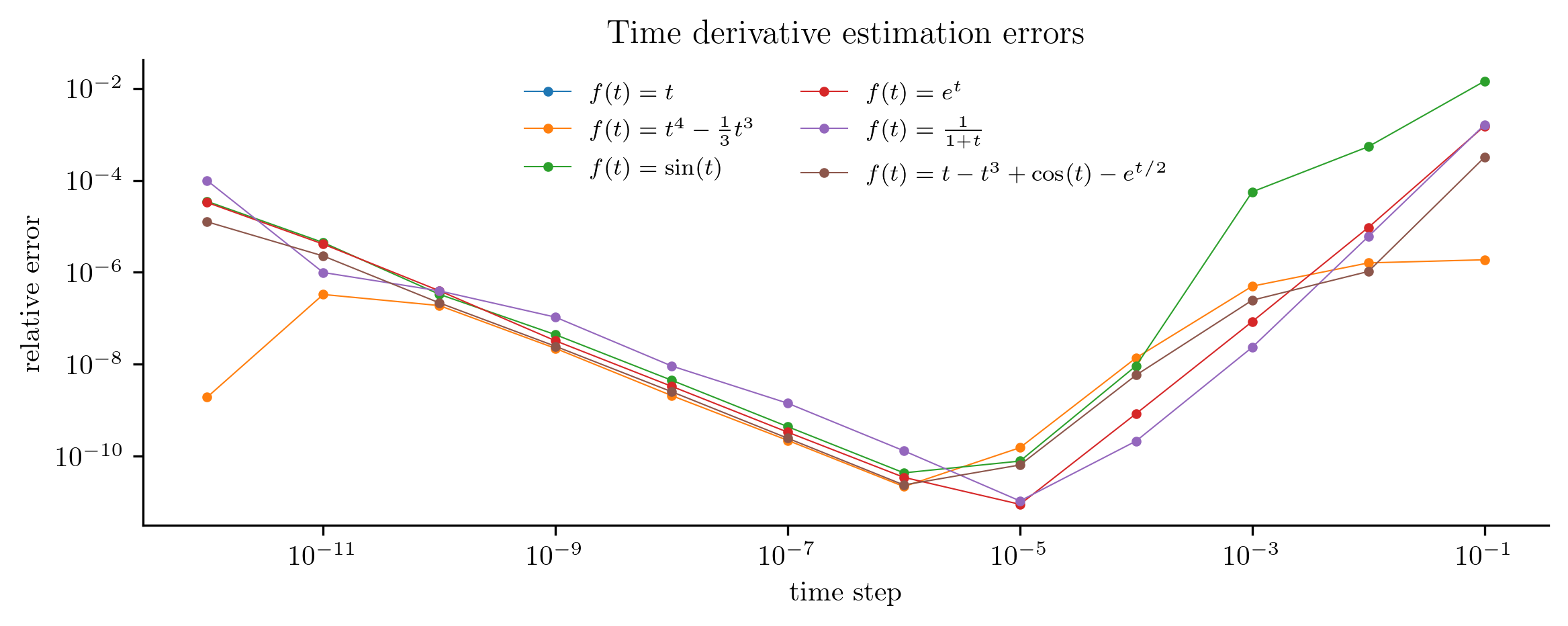
estimator.verify(plot=True)
estimate() output shapes are consistent
Custom Estimators#
New time derivative estimators can be defined by inheriting from DerivativeEstimatorTemplate.
Once implemented, the verify() method may be used to compare the results of estimate() with true derivatives for a limited number of test cases.
class MyEstimator(opinf.ddt.DerivativeEstimatorTemplate):
"""Inheritance template for custom derivative estimators."""
# Constructor -------------------------------------------------------------
def __init__(self, time_domain, hyperparameters):
"""Set any hyperparameters.
If there are no hyperparameters, __init__() may be omitted.
"""
super().__init__(time_domain)
# Process hyperparameters here.
# Required methods --------------------------------------------------------
def estimate(self, states, inputs=None):
"""Estimate the first time derivatives of the states.
Parameters
----------
states : (r, k) ndarray
State snapshots, either full or (preferably) reduced.
inputs : (m, k) ndarray or None
Inputs corresponding to the state snapshots, if applicable.
Returns
-------
_states : (r, k') ndarray
Subset of the state snapshots.
ddts : (r, k') ndarray
First time derivatives corresponding to ``_states``.
_inputs : (m, k') ndarray or None
Inputs corresponding to ``_states``, if applicable.
**Only returned** if ``inputs`` is provided.
"""
raise NotImplementedError
Example: Cubic Spline Interpolation#
The following class wraps scipy.interpolate.CubicSpline and uses its derivative() method to compute the derivative.
This is a simplified version of DerivativeEstimatorTemplate.
class CubicSplineEstimator(opinf.ddt.DerivativeEstimatorTemplate):
"""Derivative estimator using cubic spline interpolation."""
# Constructor -------------------------------------------------------------
def __init__(self, time_domain, bc_type="not-a-knot"):
"""Save arguments for scipy.interpolate.CubicSpline."""
super().__init__(time_domain)
self.options = dict(bc_type=bc_type, axis=1, extrapolate=None)
# Required methods --------------------------------------------------------
def estimate(self, states, inputs=None):
"""Estimate the first time derivatives of the states."""
spline = spinterpolate.CubicSpline(
x=self.time_domain,
y=states,
**self.options,
)
ddts = spline(self.time_domain, 1)
if inputs is None:
return states, ddts
return states, ddts, inputs
spline_estimator = CubicSplineEstimator(t)
print(spline_estimator)
---------------------------------------------------------------------------
TypeError Traceback (most recent call last)
Cell In[15], line 1
----> 1 spline_estimator = CubicSplineEstimator(t)
2 print(spline_estimator)
TypeError: Can't instantiate abstract class CubicSplineEstimator without an implementation for abstract method 'mask'
spline_estimator.verify()